


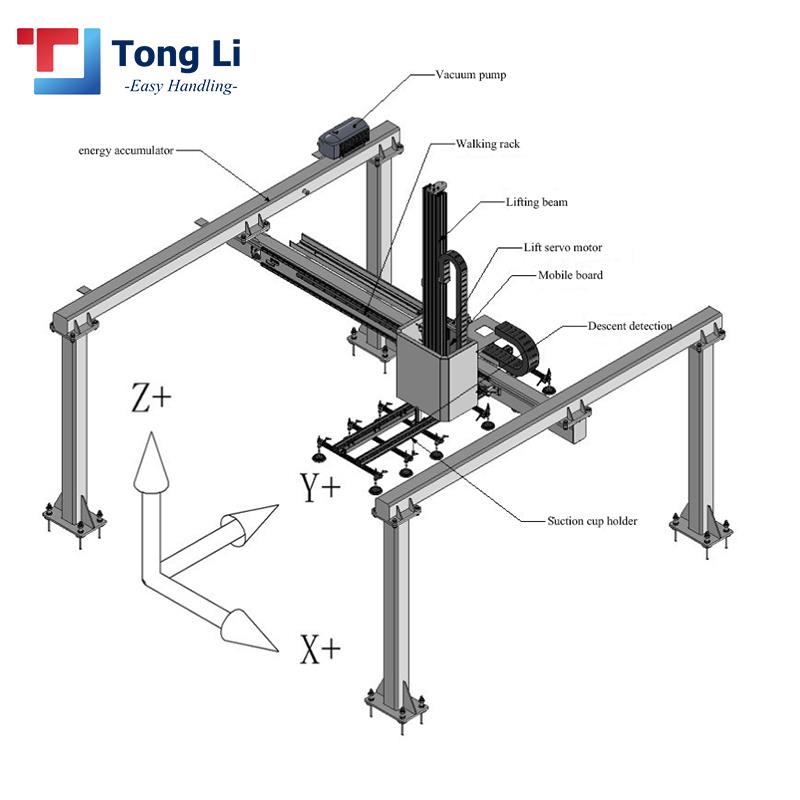
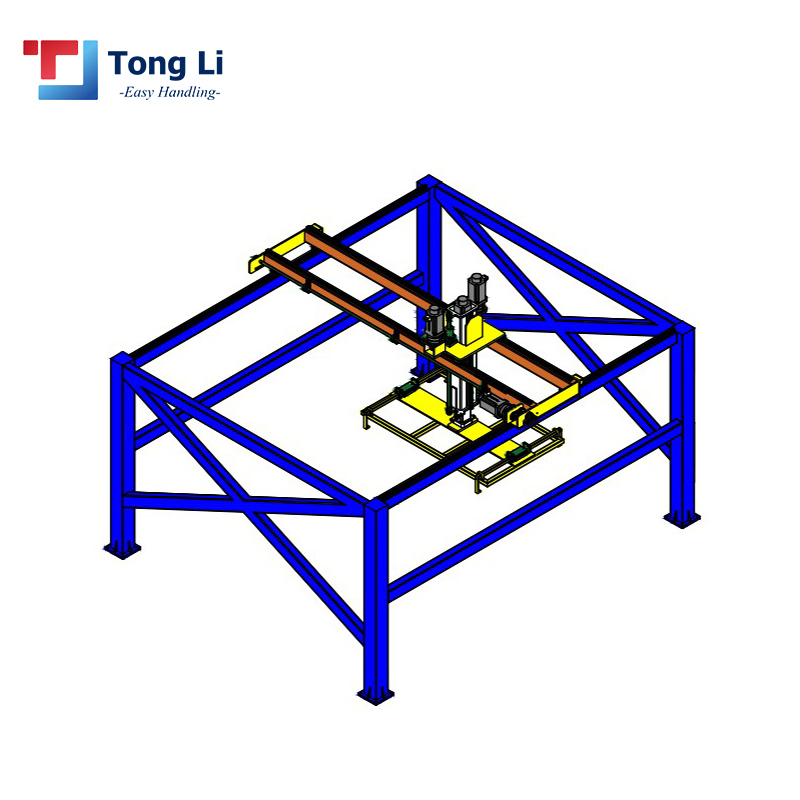
Gantry roboty
Ferma manipulýatory stanok gurallaryny we önümçilik liniýalaryny ýüklemek we düşürmek, iş bölegini aýlamak, iş bölegini aýlamak we ş.m. üçin amatly bolan integrasiýalaşdyrylan gaýtadan işlemek tehnologiýasyny ulanýar. Şol bir wagtyň özünde, onuň ýokary takyklykly gysgyç we ýerleşdiriş gurallary ulgamy robot awtomatiki işläp düzmek üçin standart interfeýsi üpjün edýär we ýerleşdirişiň gaýtalanmagy takyklygy ýokary takyklygy, ýokary netijeliligi we tapgyrlaýyn önümleriň yzygiderliligini üpjün edýär.
Ferma manipulýatory konteýnerde (karton, dokalan halta, bedre we ş.m.) ýa-da gaplanan we gaplanmadyk adaty zady awtomatiki usulda ýerleşdirip bilýän enjamdyr. Ol zatlary belli bir tertipde bir-birden alyp, paletde ýerleşdirýär. Bu prosesde zatlary birnäçe gatlakda ýerleşdirip, itekläp çykaryp bolýar, gaplamak we saklamak üçin ammara ibermek ýaly indiki ädime geçmek amatly bolar. Ferma manipulýatory akylly operasiýa dolandyryşyny amala aşyrýar, bu bolsa zähmetiň köp mukdarda sarp edilmegini ep-esli azaldyp we harytlary şol bir wagtyň özünde gowy gorap bilýär. Şeýle hem, onuň aşakdaky funksiýalary bar: tozanyň öňüni almak, çyglylyga garşy, gün şöhlesine garşy, daşamak wagtynda aşynmagyň öňüni almak. Şonuň üçin ol himiki serişdeler, içgiler, azyk önümleri, piwo, plastmassa ýaly köp önümçilik kärhanalarynda karton, halta, banka, piwo gutulary, çüýşeler we ş.m. ýaly dürli görnüşli gaplama önümlerini awtomatiki usulda ýerleşdirmek üçin giňden ulanylýar.
1. Awtomobil şaýlary senagaty
2. Azyk senagaty
3. Logistika pudagy
4. Gaýtadan işlemek we önümçilik
5. Tamaki we alkogol senagaty
6. Agaç gaýtadan işleýän senagat
7. Maşyn gurallaryny gaýtadan işleýän senagat
| Awtomatiki ferma manipulýatory | |||||
| Ýük (kg) | 20 | 50 | 70 | 100 | 250 |
| Çyzyk tizligi | |||||
| X ok (m/s) | 2.3 | 1.8 | 1.6 | 1.6 | 1.5 |
| Y ok (m/s) | 2.3 | 1.8 | 1.6 | 1.6 | 1.5 |
| Z ok (m/s) | 1.6 | 1.3 | 1.3 | 1.1 | 1.1 |
| Işiň gerimi | |||||
| X ok (mm) | 1500-45000 | 1500-45000 | 1500-45000 | 1500-45000 | 1500-45000 |
| Y ok (mm) | 1500-8000 | 1500-8000 | 1500-8000 | 1500-8000 | 1500-8000 |
| Z ok (mm) | 500-2000 | 500-2000 | 500-2000 | 500-2000 | 500-2000 |
| Gaýtalanýan ýerleşdiriş takyklygy (mm) | ±0.03 | ±0.03 | ±0.05 | ±0.05 | ±0.07 |
| Ýaglama ulgamy | Konsentrlenen ýa-da garaşsyz ýaglama | Konsentrlenen ýa-da garaşsyz ýaglama | Konsentrlenen ýa-da garaşsyz ýaglama | Konsentrlenen ýa-da garaşsyz ýaglama | Konsentrlenen ýa-da garaşsyz ýaglama |
| Çaltlaşdyrylan tizlik (㎡/s) | 3 | 3 | 3 | 2.5 | 2 |


